


Arduino Joystick Controller

توضیحات Arduino Joystick Controller
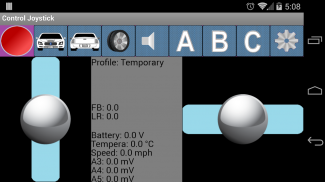
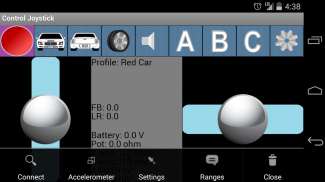
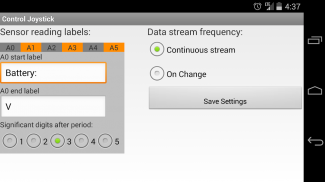
***This application is meant to control an Arduino based RC car over Bluetooth.
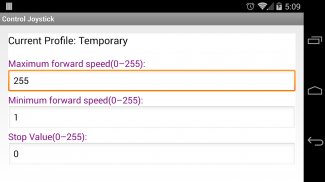
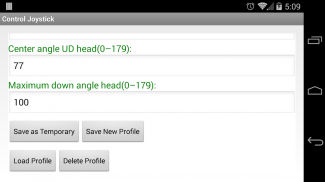
If you want to precisely control your Bluetooth enabled Arduino RC car, this application lets you do that. Composed of two joysticks, you can independently control the car's steering and speed. You can also set the steering and speed ranges from within the application. And in case you have more that one car, each one can have its one set of ranges. In case you have a tank, you can control its cannon by just toggling a button. And since the Arduino can read sensor values, the application is able to receive six independent readings. The first two are floating point readings, while the remaining four are a single byte long. The application sends a command every 50ms. This feature lets the car detect when it is out of range, in which case it'll stop before crashing.
Please visit the tutorial page for the Arduino program and circuit schematics.
</div> <div jsname="WJz9Hc" style="display:none">*** Deze applicatie is bedoeld om een Arduino gebaseerde RC auto te controleren via Bluetooth.
Wilt u precies te controleren uw Bluetooth Arduino RC auto, deze applicatie kun je dat doen. Samengesteld uit twee joysticks kunt u onafhankelijk controle besturing en de snelheid van de auto. U kunt ook de besturing en de snelheid varieert vanuit de applicatie. En in het geval u meer dan een auto hebt, kan iedereen zijn een set van reeksen hebben. In het geval u een tank, kunt u de kanon controle door gewoon schakelen op de knop. En aangezien de Arduino sensor waarden kunnen lezen, de applicatie is in staat om zes onafhankelijke metingen ontvangen. De eerste twee zijn floating point waarden, terwijl de overige vier zijn een byte lang. De applicatie stuurt een commando elke 50ms. Deze functie laat de auto detecteren wanneer het buiten bereik is, in welk geval het voor de crash zal stoppen.
Kunt u terecht op de tutorial pagina voor de Arduino programma en circuit schema.</div> <div class="show-more-end">
Arduino Joystick Controller - نسخه 1.2
(11-03-2016)
Arduino Joystick Controller - اطلاعات APK
نسخه APK: 1.2حزمة: com.andico.control.joystickآخرین نسخه Arduino Joystick Controller
سایر نسخهها














اپلیکیشنها در دسته مشابه









